商品详情

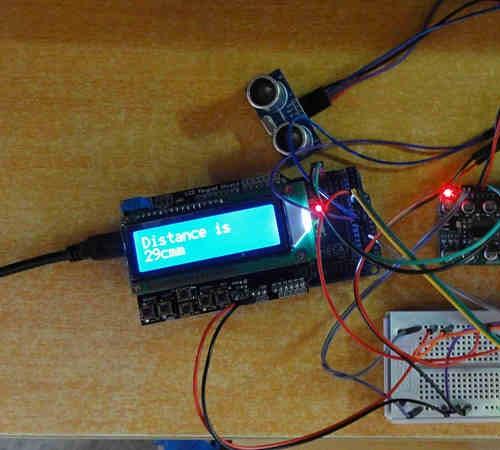



本设计采用市场上倒车雷达常用的超声波测距原理,驾驶者在倒车时,启动倒车雷达,在Arduino控制器的控制下,由装置于车尾保险杠上的超声波探头HC-SR04发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,自动计算出车与障碍物之间的距离。当在探测范围内有障碍物时,发光管以一定频率闪烁,闪烁的频率以距离定,距离越近频率越高,同时蜂鸣器提示报警,LCD1602液晶实时显示到障碍物的距离。从而使驾驶者倒车时做到心中有数,使倒车变得更轻松。本设计的提示方式有液晶显示距离、语言、led灯和蜂鸣器声音四种报警方式。在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。